|
The term SONAR, is a much-used acronym and derives from the term “sound navigation and ranging”.
“Sonar” devices are used primarily for the detection and location of underwater objects by reflecting acoustic waves from them, or by the interception of acoustic waves from an underwater, surface, or above-surface acoustic source.
Sonar operates with sound waves in the same way that radar and therefore radio direction-finding equipment operate with electromagnetic waves, and includes the use of the Doppler effect, radial component of velocity measurement, and triangulation.
Developments in sonar technology have radically altered the
way in which the commercial fisherman seeks fish; no longer
totally reliant upon “local knowledge” or an ability to read
the sea, or indeed the behaviour of its inhabitants, the modern
fisherman is perhaps more dependant upon the ability to use
a “fish finder” which electronically interprets the reflections
of sound that it has transmitted through the water.
By comparing the output and the returned signals, the
equipment can not only be used to indicate the presence of
a shoal of fish, but also to determine the species, approximate
size, the speed and direction of a shoal’s movement or indeed
the characteristics of a single fish.
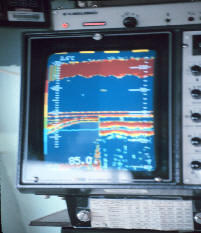
Received reflected acoustic signals are converted into images. Colour is used to indicate the “reflectivity” of the target; essentially, the apparatus can be programmed so that each “target species” appears as different coloured image on screen, enabling the user to discriminate between species. Since each species can be assigned an array colour, the size and number of images of a particular colour indicates the fish density or shoal size. The streamed data may then used to calculate the catch potential, thereby removing the element of chance and substituting a definite outcome for a given task. The apparatus clearly indicates the presence in the vicinity of any programmed species; this includes marine mammals, which produce easily discriminated signatures or clearly defined colour / size traces on the monitor.
In the marine environment, many of the “occupants” use sound, both emission and detection, in much the same way as terrestrial dwellers make use of sound to estimate distances, locate objects etc. We know we are walking close to a wall when we hear our own footfalls reflected to our ears from the surface of the wall. The closer the returned echo from the wall to the original sound of the shoe hitting the ground, the closer we are to the wall – an interpretation process not unlike a dolphin echo locating.
We are capable of determining greater distances by using our own voices to “echo-locate” – if it takes an echo of our shout approximately two seconds to return to us, then allowing for a few variations caused by the moisture and dust content of the air we know that we are about 320 metres or so from the object reflecting our voice. If we are climbing a mountain the sounds take longer to be returned to us as the speed of sound in air decreases with the density of the air – the “thinner” the air the slower the sound travels, conversely, the more dense the air the faster the sound travels. The maximum density of air is usually found at sea level.
The principle of the speed of sound being greater in more “dense mediums” is dependant not so much upon the “true density” of the object, but upon the proximity of the atoms and molecules of which it is made.
Some refer to this aspect as “hardness” or a function of the reflective capability of a material rather than its refractive properties – it would perhaps be better to describe it as its sound conductivity –i.e. some materials are better than others at letting sound pass through them
Sound energy is transmitted from one point to another by the handing on of energy from one molecule to the next, put another way, sound gets from one place to another by vibrating its way along a series of atoms or molecules, make the spaces between the molecules bigger and it travels more slowly, too big and it won’t travel at all (sound can’t travel through a vacuum). If the spaces are small then it can travel faster.
Sound travels approximately five times as fast in water as it does in air, and about twelve times faster in really dense (acoustically hard) materials like steel. More to the point less energy is lost as it travels from one point to another through the more “dense” materials, so sound can travel further since it loses less energy as it travels.
A good comparison can be drawn from our ability to hear a pin drop in a quiet room – not usually heard from more than a couple of metres away – interestingly our ears are capable of detecting very small amounts of sound energy – so small that if it wasn’t for the background noises we could hear that same pin dropped several kilometres away!
For many marine species the dropped pin used in the above analogy would equate to the comparative sound level of a steel girder or I-beam dropped from a great height on to a concrete surface close to our ears – loud and a lot of energy! Marine species are highly dependant upon the transmission of vibrations through water for the location of the food, warnings of approaching danger, and communication between group members. We know that dolphins communicate through a series of whistles and clicks; we know that some whales sing; we know that we can detect these sound emissions over vast ocean distances; it is reasonable to assume that cetaceans have the capability to hear these sounds.
Cetacean response to these relatively low frequency emissions is well documented, and logic would suggest that the whale song has a purpose other than the sheer exuberance of living permanently in the oceans and or indeed singing simply because they can!
Science has provided the means to listen to all manner of underwater sound emissions, both those “active” i.e. returned echoes originally sent out by the listener, and “passive” detecting those sent out intentionally or otherwise by another “body”.
In the same way that wind blowing through branches and leaves, produces a characteristic rustle depending upon the species of tree, so too does water rushing through seaweed or sea-grass, or for that matter over broken rock or sand. How those sounds are interpreted depends upon the ability of the listener to hear variations in the patterns of sound, their previous experience of the sounds produced, and a series of assumptions or computations based on that previous experience and lastly an accurate assessment based on all known acquired knowledge and its application within as wide a set of fields as possible otherwise known as a “guestimate”.
The human underwater experience is little more than a hundred years old, in terms of scientific investigation, considerably less and as yet we have only engineered a series of strategies that enable us to cope with the underwater environment by recreating localised versions of a terrestrial existence, for a relatively short period. However, marine organisms have evolved to cope by using strategies based on an aquatic existence.
|